


一、学院简介
51吃瓜网始建于1958年,是金沙建校时成立的三大院系之一。经过六十余年的建设与发展,学院现有“机械工程”一级学科博士点和“机械”、“能源动力”两个专业学位硕士点。2010年以来,“机械工程”学科为天津市重点学科,2017年获批天津市特色学科群“智能轻工装备”,2021年获批天津市高校服务产业特色学科群“智能轻工装备制造”和“智能汽车与大数据”。拥有天津市轻工与食品工程机械装备集成设计与在线监控重点实验室、天津市低碳绿色过程装备国际联合研究中心、天津市现代汽车安全技术国际联合研究中心等省部级科研平台。

近年来,学院先后获批国家863项目、国家重点研发计划、国家自然科学基金项目等国家级纵向项目近百项,各类横向项目500余项,到校科研经费逐年增加。学院教师发表高水平学术论文的能力不断提升,每年发表ESI高被引论文在内的高水平学术论文百余篇。近五年荣获国家级、省部级以上科研奖励十余项。其中包括国际科学技术合作奖1项,天津市科技进步二等奖3项,天津市技术发明二等奖1项,中国轻工业联合会科技进步奖二等奖1项,石油与化工联合会科技进步奖三等奖1项等。
二、学院部分科研团队介绍
(一)服务机器人与仿生设计团队
团队基于人机耦合优化的学术观点,构建了集成步态运动分析、三维压力检测、表面肌电分析、骨肌生物力学建模与仿真技术的人体机能测试与仿生设计研究平台。
主要研究方向:
•基于神经网络的智能控制模式,利用多层前馈神经网络对多变量的相互作用下的步态数据进行拓展、分析,构建适应多环境的助行器智能控制模型。
•基于自适应平衡的运动与结构仿生,以人体肌肉骨骼运动学及动力学为指导,采用直线驱动以模拟人体肌肉伸缩,实现了结构仿生。对人行走过程中失稳后恢复平衡的机理进行机器学习,实现运动模式的高度仿生。
•人机协调性与穿戴舒适性,进行了人机耦合与通用性设计并具有高度的人机协调性。进行轻量化设计,减少能耗的同时保证了穿戴舒适性。
(二)低碳绿色过程装备创新团队
团队基于节能理论的过程强化和新能源技术,探明过程机理,研发智能高效、节能降耗、绿色低碳、模块集成化的装备,以实现过程工业的“绿色低碳环保”为目标。
主要研究方向:
•食品干燥技术与装备
•能源统计分析及过程评价
•废弃物资源化利用技术
(三)机器人与机器视觉测量团队
团队以工业及水下机器人为载体,融合机器视觉检测与测量、基于机器视觉的光学镜头设计、深度学习、水下多重传感与控制、物联网等优势技术,服务企业自动化、信息化、智能化建设,助力国家智能制造战略。研究方向包括:机器视觉测量、工业生产线产品质量在线检测、工业生产线产品识别与分类、用于汽车辅助驾驶的目标检测、水下机器人、光学镜头设计、智能噪声与振动、并联机器人等。团队秉承“以科研为基础,以企业为平台,以工程项目为指导”理念,培养了大批多学科交叉复合型人才。
主要研究方向:
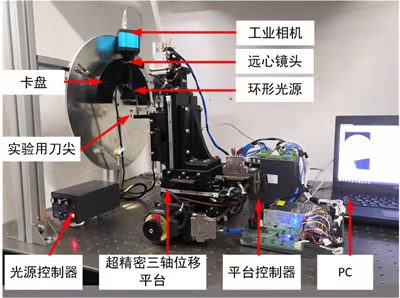
• 机器视觉测量
a) 机器视觉检测技术
b) 视觉反馈的机器人自稳定控制技术
c) 机器人3D视觉检测及识别及测控技术
d) 视觉机器人系统开发
e) 工业自动化设备系统开发
• 水下机器人
a) 水下机器人结构设计研究
b) 水下机器人运动控制策略研究
c) 水下机器人自动避障算法研究
d) 水下目标识别和跟踪技术研究
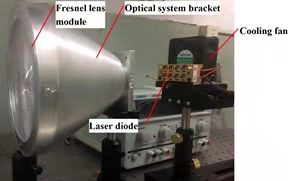
• 光学镜头设计
a) 基于机器视觉的非标变焦镜头、红外镜头、超短焦镜头设计及制造
b) 复杂离轴光学系统设计、光机系统设计、照明光学系统设计
• 智能噪声与振动
a) 智能噪声与振动控制方法研究
b) 智能噪声与振动控制算法研究
c) 振动与噪声测量方法研究
d) 振动与噪声测量中算法的研究
• 并联机器人
a) 并/混联机器人机构学理论
b) 并/混联机器人运动控制技术
c) 刚柔混合机器人设计与理论


(四)汽车大数据与智能网联技术团队
团队总体定位于汽车大数据与智能网联技术研究,面向智能汽车行业前沿和国家质量强国战略发展需求,关注车辆的长期可靠性,进行无人驾驶技术、智能网联技术、大数据分析技术、耐久性验证技术的跨界交叉研究。
主要研究方向:
•自动驾驶技术:
a)车辆试验智能技术
b)自动驾驶场景及其可靠性
c)自动驾驶计算机仿真
d)驾驶员疲劳检测
e)Autonomous Driving System Verification and Validation
•机械性能智能技术:
a)车辆或复杂系统机械性能大数据深度学习、机器学习
b)载荷谱测试及智能网联技术
c)客户可靠性、耐久性信息及智能技术
d)智能试验 - 激光图像技术、智能技术
•机械性能及可靠性技术:
a)整车振动与噪声
b)汽车性能衰减技术研究
c)振动疲劳、高温机械疲劳、高温氧化疲劳、声疲劳、损伤容限
d)复合材料分析和试验测试
e)整车性能设计匹配
f)可靠耐久性开发体系研究
g)计算机仿真及试验
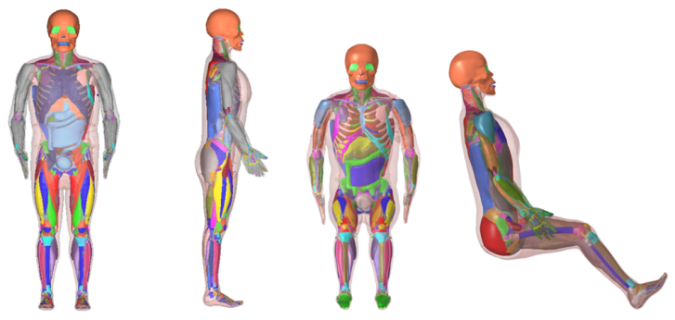
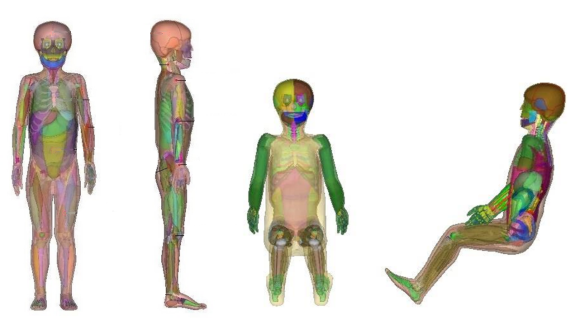
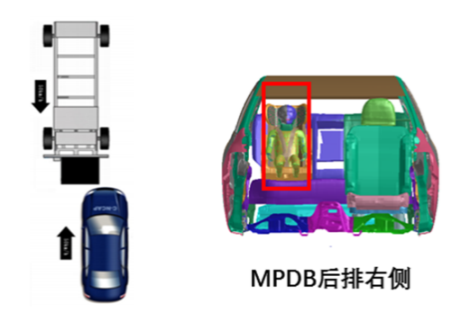
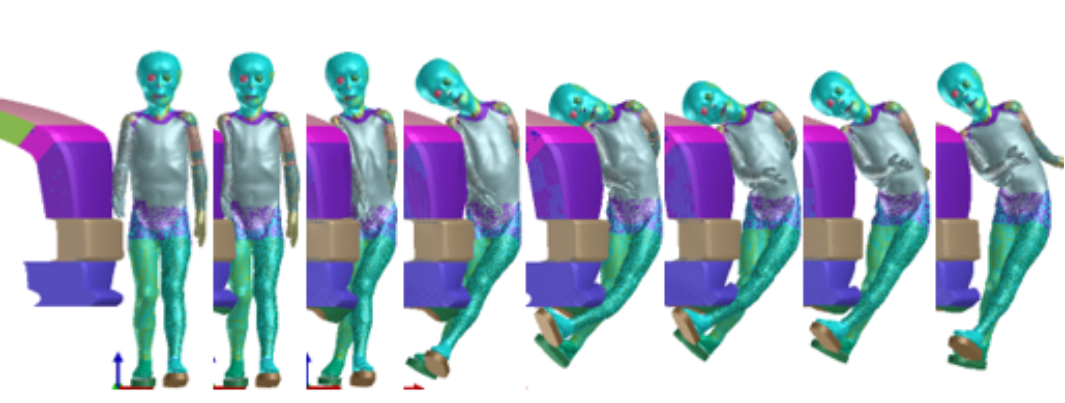
(五)车辆安全与损伤生物力学团队
围绕具有高生物仿真度的人体有限元建模技术,以人体-车辆的碰撞响应数据和汽车大数据为依据,应用计算生物力学的原理,结合人体碰撞损伤机制的分析,采用计算机辅助工程设计方法,研究行人、乘员与车辆在碰撞中的相互关系,对人体、车辆进行系统的分析,提出并确定车辆结构、约束系统以及车辆内外接触表面的安全设计基本参数和标准体系,为新能源汽车、智能汽车和传统汽车的安全系统设计提出具体的科学措施,为汽车安全领域的研发提供基础数据和设计工具。
主要研究方向:
•人体生物力学建模和损伤机理研究
•汽车主、被动安全系统
•汽车车身耐撞性设计
(六)力学与无损检测研究团队
团队基于包括无损检测技术在内的多传感技术和多物理场、多尺度仿真模型,利用包括机器学习在内的各类数据科学方法,研究机械装备及服役过程中材料的结构性能及其损伤失效机理。主要承担航空航天、石油化工、海洋工程、车辆工程等装备领域的结构分析、测试和设计方面的研发工作。
研究生培养内容:
•掌握有限元分析的原理,熟练应用常用有限元分析软件,包括Abaqus、Ansys、Comsol等;并能够针对具体工程问题进行二次开发。
•掌握面向机械设计的广义优化设计方法,熟练应用大型优化设计软件,能够应用Python进行二次开发。
•掌握主要的机械强度试验方法和技术,包括MTS疲劳试验、材料万能试验、DIC试验、超声探伤、声发射检测、磁记忆检测等。
•接触了解工程实际问题的结构分析、结构设计、无损检测流程。
(七)先进材料精密制造与特种加工团队
团队总体定位于先进制造领域精密与特种加工工艺应用基础研究,面向机械制造学科前沿和国家战略性新兴产业高端装备制造发展需求。
主要研究方向:
•精密/超精密加工理论与技术
•特种加工理论与技术
•航空航天微低重力模拟仿真与测试设备研制
•卫星应用技术设备制造
•智能测控装备制造
•航空发动机使役性能评价

(八)先进能源环境材料创新团队
团队基于先进材料制备技术及表面改性技术,探明过程机理,研发应用于环境净化及能源高效利用的先进功能材料,集成材料、机械及控制等部件,实现轻工及食品机械领域高端高附加值设备及机器的生产,以实现轻工及食品装备领域的低碳绿色环保的最终目标。
主要研究方向:
•光催化环境净化原理及技术
•超导技术及其线材工业化生产
•注射成型及可降解塑料成型
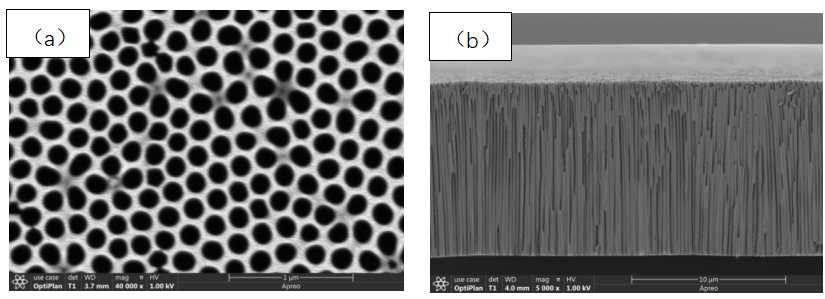
(九)先进材料超精密制造与表面改性团队
短波激光或等离子体在集成电路制造、特种微纳结构制备、生命医学蛋白检测等领域应用广泛,也是国家集成电路等产业急需的核心技术装备。课题组从激光、等离子体物理出发,研究高次谐波和激光等离子体尾场等次级辐射机制,实现高重频、桌面型极紫外辐射源,应用于高能量密度物理等离子体加工、半导体极紫外光刻、高精度生物蛋白检测。
主要研究方向包括:
•金属材料表面改性技术研究
•干涉光刻法制微纳结构及其应用研究
•纳米结构表面微悬臂梁生物传感器的设计与研究
•城市轨道交通盾构机/TBM隧道挖掘关键技术研究
(十)现代机构学创新与智能装备设计团队
团队以现代机构学理论为基础,结合机电一体化与工业互联网技术,围绕智能装备设计及行业工程需求,开展各种食品、轻工、石化及医疗等领域装备关键部件的基础理论与关键技术研究。导师组成结构合理,包括具有机械工程学科背景的校内导师、校外导师及具有化工学科背景的校内导师等,具备坚实的机械设计与机电一体化理论基础、技术能力与实践经验。
主要研究方向:
•间歇机构及其他传动机构创新设计理论研究
•“地下航母”硬岩掘进装备动态特性研究
•管道非开挖智能化修复技术与装备研发
•水压清障微型盾构机设计理论及关键技术研究
•机械密封设计与研究

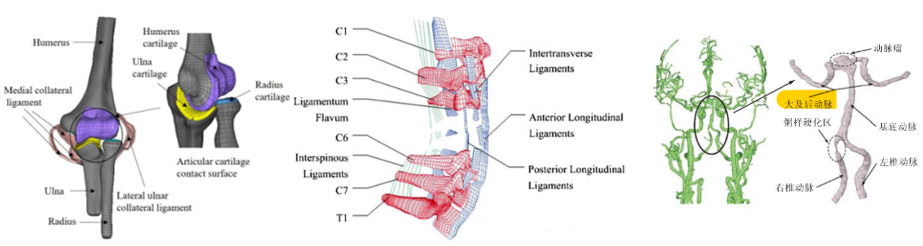
(十一)肌骨系统生物力学与康复辅具设计团队
本团队遵循“生物力学分析-康复技术-辅具设计开发”学术思想,采用实验研究与建模分析的方法,研究肌骨组织的生物力学机理与特性,建立人体肌骨系统损伤及康复的检测与分析评价体系,设计开发相关的康复辅具装置,评估“人-机工程”的生物力学功效,实现人体运动机能的检测、评估、治疗与康复。
研究方向:
(1)通过对肘关节的生物力学原理进行研究,揭示肘关节损伤的力学机制,可为肘关节外科手术的改进和评价提供理论依据。基于数理力学基础的肌骨系统组织多尺度生物力学与力学生物学研究,进行其重建、损伤与康复机理的研究与应用。
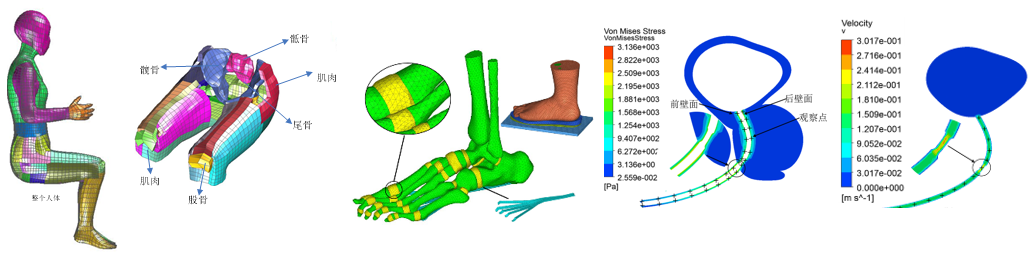
(2)建立人体膝盖、小腿和脚部的有限元模型,分析足底压力分布及步态特征,研究足部的足跟痛、筋膜炎、跟腱炎等损伤机理,在此基础上,设计开发新型可减小足底压力的鞋垫。
(3)基于生物力学原理的肌骨系统运动仿真模型,进行损伤、人-机工程、康复机理的分析与应用;研究运动与组织生长相互作用机制,研制主动康复训练系统。
(4)基于生物力学特征的测量与分析,针对老年人功能退化、特殊疾病(脑瘫、中风、肢体缺损等)所导致的功能障碍,开展康复原理与机制、评价方法与技术、智能型老年人照护机器人关键技术及系统研发。
(5)研究人体的操作疲劳的机制与评价方法以及在不同环境下对人体作业能力、生理信号(肌电、坐压应力等)等的影响,提出装备工程设计的技术要求与人机适配性的评价方法。